ESEMPI INTERATTIVI
The Matrix has you
Ogni tecnologia presentata in questa pagina rappresenta una leva concreta per generare valore
misurabile: riduzione dei costi operativi, ottimizzazione dei processi produttivi, aumento
dell'efficienza energetica e miglioramento del ROI. Non sono demo astratte, ma soluzioni
pronte per essere integrate nei vostri sistemi aziendali.
Cocce sviluppa software enterprise su misura che trasforma queste tecnologie in vantaggio
competitivo: algoritmi di ottimizzazione per logistica e produzione, intelligenza
artificiale per automazione e supporto decisionale, simulazioni fisiche per ingegneria e
controllo qualità, fino ad arrivare a soluzioni di
Advergaming ed Esperienze
Interattive
dove algoritmi, simulazioni e AI vengono applicati a obiettivi di business come lead generation,
product launch e formazione aziendale gamificata. Ogni soluzione è progettata per digitalizzare i
processi aziendali
e generare risparmi tangibili, misurati in ore-uomo recuperate, consumi ridotti, scarti
minimizzati e saturazione ottimale delle risorse.
Il risultato per la vostra organizzazione: processi più snelli, decisioni più rapide,
costi operativi ridotti e una piattaforma software scalabile che cresce con il vostro business.
Tutte le tecnologie sono fruibili via browser e integrabili su piattaforme web,
mobile, desktop, totem interattivi, sistemi embedded e bordo macchina, con un approccio
multi-target che permette interconnessione industriale, acquisizione dati, monitoraggio
in tempo reale e automazione avanzata.
Contattateci per trasformare
queste tecnologie in un progetto su misura per la vostra azienda.

Interagire con la simulazione per visualizzare l'algoritmo di Bresenham applicato al path finding su griglia.
Osservare come l'algoritmo calcola il percorso ottimale pixel per pixel, dimostrando l'efficienza computazionale.
Valore per la tua azienda
- Il Bresenham Line Algorithm è il fondamento matematico per il path finding su griglia discreta utilizzato in robotica, AGV, sistemi di navigazione e automazione di magazzino.
- Un percorso ottimale su griglia significa movimenti più efficienti, minori tempi di attraversamento e consumi energetici ridotti per macchine e robot che operano in ambienti strutturati.
- I nostri algoritmi trasformano la pianificazione dei percorsi in un vantaggio competitivo misurabile, integrabile in qualsiasi sistema di movimentazione automatica.
Cosa risolviamo
- Movimenti inefficienti su griglia: robot e AGV che seguono percorsi non ottimali consumano più energia e impiegano più tempo per spostarsi tra punti.
- Collisioni e congestione: senza una pianificazione accurata, più veicoli autonomi nella stessa area generano conflitti e blocchi.
- Implementazioni approssimate: algoritmi di pathfinding poco precisi generano traiettorie a zig-zag, usura meccanica e usura del pavimento.
La nostra tecnologia
- Implementazione dell'algoritmo di Bresenham con ottimizzazioni per path finding su griglia, che calcola il percorso con sola aritmetica intera — zero floating point, massima efficienza.
- Integrabile su microcontrollori, PLC, sistemi embedded e PC industriali per applicazioni di controllo movimento in tempo reale.
- Combina la precisione geometrica con euristiche di navigazione per generare percorsi lisci e ottimali in ambienti con ostacoli.
ROI e impatto sul business
- Maggiore efficienza AGV: 15-25% — i veicoli a guida automatica percorrono traiettorie ottimali, riducendo tempi ciclo e consumi.
- Robotica industriale: pianificazione di traiettorie su griglia per bracci robotici, pick-and-place e saldatura.
- Logistica di magazzino: percorsi ottimali per traslatori, shuttle e carrelli automatici tra scaffalature e baie.
- Automazione di fabbrica: movimenti precisi e ripetibili per macchine utensili, incisori e plotter industriali.
- Sistemi embedded: implementazione ultra-leggera eseguibile su hardware a basso costo per applicazioni IoT e bordo macchina.
Interagire con la simulazione per osservare il raycasting e il flood fill applicati al calcolo delle ombre in tempo reale.
Sperimentare con diverse configurazioni di luce e ostacoli per comprendere il comportamento dell'illuminazione.
Valore per la tua azienda
- La simulazione di illuminazione e ombre con raycast e flood fill è alla base di progettazione architettonica, rendering industriale, visualizzazione di prodotto e sistemi di visione artificiale.
- Prevedere digitalmente come luce e ombre interagiscono con un ambiente permette di ottimizzare l'illuminazione di stabilimenti, uffici e spazi commerciali prima ancora di installare un singolo punto luce.
Cosa risolviamo
- Progetti di illuminazione a costo: installate corpi illuminanti senza sapere esattamente come si comporteranno, con costi di adeguamento successivi.
- Rendering e prototyping costosi: ogni variante di illuminazione richiede un nuovo rendering o un mockup fisico.
- Visione artificiale non ottimizzata: sistemi di ispezione ottica che falliscono per condizioni di illuminazione non controllate.
La nostra tecnologia
- Utilizziamo raycasting per tracciare i raggi luminosi da sorgenti puntiformi, combinato con flood fill per determinare aree in ombra e penombra in modo efficiente.
- La simulazione calcola in tempo reale la mappa di visibilità dell'ambiente, distinguendo zone illuminate, in ombra e parzialmente coperte.
- Integrabile in software di progettazione, architettura e visione artificiale per simulazioni accurate senza hardware dedicato.
ROI e impatto sul business
- Riduzione costi di progettazione illuminotecnica: 30-50% — simulate decine di configurazioni di luce prima di installare fisicamente.
- Risparmio energetico: progettazione di impianti luce ottimizzati che minimizzano i consumi mantenendo l'illuminamento target.
- Architettura e interior design: studio dell'impatto della luce naturale e artificiale in spazi commerciali, uffici e showroom.
- Automotive e product design: simulazione di illuminazione su superfici e materiali per valutare resa estetica e visibilità.
- Videogiochi e esperienze interattive: sistemi di illuminazione dinamica per ambienti virtuali immersivi, fiere e installazioni.
Interagire con la simulazione per osservare il comportamento dinamico dei fluidi e le interazioni con ostacoli e confini.
Sperimentare con diverse configurazioni per comprendere i principi di flusso, pressione e turbolenza.
Valore per la tua azienda
- La fluidodinamica computazionale è essenziale in innumerevoli settori industriali: aerospaziale, automotive, oil & gas, chimico, alimentare, HVAC — ovunque un fluido (liquido o gas) interagisca con un prodotto o un processo.
- Simulare il comportamento dei fluidi digitalmente significa ridurre i prototipi fisici, accelerare lo sviluppo prodotto e ottimizzare l'efficienza energetica con un ROI immediato.
Cosa risolviamo
- Test fisici costosi: gallerie del vento, vasche di collaudo e circuiti idraulici richiedono investimenti milionari e tempi lunghi.
- Progettazione senza feedback fluidodinamico: forme e condotti progettati senza simulazione generano turbolenze, perdite di carico e inefficienze che si scoprono solo a prototipo finito.
- Dimensionamento errato: pompe, valvole, tubazioni e scambiatori di calore sovradimensionati o sottodimensionati con costi energetici e manutentivi maggiori.
La nostra tecnologia
- Il simulatore utilizza il metodo Lattice Boltzmann (LBM) per modellare il fluido come insieme di particelle che si muovono e collidono su una griglia discreta — approccio parallelo e numericamente stabile.
- Supporta ostacoli interni, confini variabili e sorgenti multiple, consentendo di modellare scenari industriali realistici come condotte, camere di miscelazione e profili aerodinamici.
- Visualizzazione in tempo reale con mappe di velocità, pressione e vorticità per un feedback immediato sulle modifiche progettuali.
ROI e impatto sul business
- Riduzione prototipi fisici: 40-60% — simulate centinaia di varianti geometriche prima del primo prototipo reale.
- Aerodinamica automotive e aerospace: ottimizzazione della resistenza all'avanzamento di veicoli, droni e componenti aeronautici.
- Oil & gas e chimico: simulazione di flusso in tubazioni, valvole, reattori e scambiatori per ridurre perdite di carico e migliorare l'efficienza di processo.
- HVAC e climatizzazione: progettazione di sistemi di ventilazione, condizionamento e movimentazione aria con distribuzione ottimale dei flussi.
- Industria alimentare e farmaceutica: modellazione di flussi in serbatoi, miscelatori e linee di riempimento per garantire omogeneità e qualità del prodotto.

Riga 1: RandomPath (genera un percorso casuale), NearestNeighbor (percorso greedy), Best (SA) (ottimizzazione con Simulated Annealing).
Riga 2: All Cities (usa tutte le città italiane), Sample Cities (campione ridotto per maggiore chiarezza).
Riga 3: pulsante Città On/Off per mostrare o nascondere i punti città — disabilitandolo si vede meglio il percorso tracciato, specialmente con molte città.
Riga 4: Pause (ferma/riprende l'esecuzione — il testo resta "Pause"), Restart (rigenera un nuovo percorso).
Valore per la tua azienda
- L'ottimizzazione dei percorsi è una delle leve più efficaci per ridurre i costi operativi in qualsiasi organizzazione che gestisca flotte, interventi o spostamenti.
- I nostri algoritmi risolvono il problema del commesso viaggiatore (TSP) su scala industriale, pianificando rotte che minimizzano tempi, distanze, consumi di carburante e usura dei mezzi.
- Il risultato è un risparmio misurabile dal 15% al 25% sui costi di trasporto e logistica, con un ritorno sull'investimento in pochi mesi.
Cosa risolviamo
- Pianificazione manuale o basata su esperienza: i vostri autisti o dispatcher pianificano le rotte "a sentimento", generando percorsi subottimali che accumulano chilometri e ore inutili.
- Complessità esponenziale: con oltre 15 punti da visitare, il numero di percorsi possibili diventa astronomico — impossibile da gestire senza algoritmi avanzati.
- Vincoli reali ignorati: finestre orarie, priorità di consegna, capacità dei mezzi, ZTL e costi diversificati per tratta sono gestiti automaticamente dal nostro ottimizzatore.
La nostra tecnologia
- Utilizziamo Simulated Annealing, una meta-euristica che esplora intelligentemente lo spazio delle soluzioni, accettando mosse subottimali transitorie per uscire dai minimi locali e convergere verso il percorso globalmente migliore.
- L'algoritmo viene eseguito su campioni rappresentativi (es. 100 tappe su 16.000 città italiane) e iterato più volte per garantire robustezza del risultato.
- Integrabile via API nei vostri sistemi ERP, MES o piattaforme di gestione flotte, con tempi di calcolo compatibili con la pianificazione quotidiana.
ROI e impatto sul business
- Riduzione carburante: 15-25% — percorsi più corti e ottimizzati abbattono il costo del carburante e le emissioni di CO₂.
- Più consegne/mezzi/ora — la stessa flotta copre più tappe nello stesso tempo, aumentando il fatturato senza investire in nuovi mezzi.
- Meno straordinari — gli autisti rientrano in sede prima, riducendo ore di guida e stress.
- Manutenzione ridotta — meno chilometri percorsi significano meno usura di pneumatici, freni e motore.
- Logistica interna di fabbrica: percorsi ottimali per AGV, muletti e carrelli tra magazzino e linee di produzione, riducendo i tempi morti.
- Robotica industriale: traiettorie ottimali per saldatura, verniciatura e pick-and-place, con cicli macchina più brevi e maggiore produttività.
- Supply chain e distribuzione: pianificazione ottimale di tour di raccolta, consegna e rotazione merci tra hub e punti vendita.

Trascinare i punti di controllo o le ancore per modificare la curva.
Selezionare nella colonna di sinistra il tipo di azione che si vuole eseguire.
Utilizzare il bottone "Random" per avviare una configurazione casuale degli agenti.
Utilizzare il bottone "Reset" per azzerare i dati della simulazione.
Selezionare nella colonna di sinistra il tipo di azione che si vuole eseguire.
Valore per la tua azienda
- Le curve Bézier sono il fondamento matematico per generare traiettorie fluide e precise in ambito produttivo: dalla robotica alle macchine CNC, dal taglio laser alla stampa 3D.
- Una traiettoria ottimizzata significa minori vibrazioni, jerk ridotto, lavorazioni più veloci e qualità superficiale superiore — tutto si traduce in minor scarto, maggiore produttività e costi ridotti.
- Cocce integra queste tecnologie in software di controllo movimento e CAD/CAM personalizzati per le vostre macchine e processi.
Cosa risolviamo
- Traiettorie a spigolo: movimenti bruschi causano usura meccanica, vibrazioni e finiture scadenti sui pezzi lavorati.
- Programmazione manuale dei percorsi: i tecnici perdono ore a scrivere codice G o istruzioni di movimento, con risultati non ottimali.
- Mancanza di strumenti di simulazione: senza un editor visuale, ogni modifica richiede test fisici costosi e rischiosi.
La nostra tecnologia
- Implementazione basata sull'algoritmo di de Casteljau e polinomi di Bernstein, con calcolo in tempo reale e rendering su Canvas per feedback immediato.
- Supporto multigrado (lineare, quadratico, cubico e superiore) per adattarsi a diverse esigenze di flessibilità del tracciato.
- Integrabile in sistemi di controllo numerico, robotica e CAD/CAM aziendali.
ROI e impatto sul business
- Riduzione tempi ciclo macchina: 10-20% — traiettorie ottimizzate permettono velocità di lavorazione più elevate senza sacrificare qualità.
- Meno scarti e rilavorazioni — la fluidità del tracciato elimina difetti superficiali e tolleranze fuori specifica.
- Usura macchina ridotta — jerk e accelerazioni controllati allungano la vita di mandrini, cuscinetti e utensili.
- Robotica industriale: pianificazione di traiettorie lisce per bracci robotici, riducendo i tempi ciclo e migliorando la precisione.
- Industria manifatturiera: percorsi utensile ottimizzati per CNC, taglio laser e stampa 3D: la qualità del pezzo finito parte dalla traiettoria.

Selezionare il tipo di forme d'onda da analizzare tramite il dropdown.
Impostare il numero di punti della forma d'onda manualmente o tramite i pulsanti presenti sul margine basso della simulazione.
Riavviare il calcolo utilizzare il bottone "Compute".
Valore per la tua azienda
- La Fast Fourier Transform (FFT) è lo strumento matematico alla base della manutenzione predittiva industriale: analizza le vibrazioni di macchinari rotanti per rilevare anomalie prima che causino fermi produttivi.
- Un guasto imprevisto su una macchina critica può costare decine di migliaia di euro all'ora. La FFT consente di identificare precocemente usura di cuscinetti, sbilanciamenti, disallineamenti e altri difetti trasformando i dati grezzi dei sensori in diagnosi actionable.
Cosa risolviamo
- Manutenzione a calendario: sostituite componenti ancora funzionanti, spendendo soldi in ricambi e manodopera non necessari.
- Guasti improvvisi: senza analisi spettrale, un cuscinetto deteriorato ferma la linea senza preavviso, con perdite di produzione enormi.
- Diagnostica affidata all'esperienza: tecnici esperti vanno in pensione e il know-how se ne va con loro — la FFT rende la diagnosi oggettiva e riproducibile.
La nostra tecnologia
- Implementazione dell'algoritmo Cooley-Tukey con complessità O(n log n), in grado di processare segnali in tempo reale su dispositivi embedded a basso consumo.
- Analisi multi-forma d'onda (seno, triangolo, dente di sega, quadra, impulso) per coprire diversi scenari di diagnostica vibrazionale.
- Visualizzazione affiancata dominio temporale/spettrale per un confronto immediato tra segnale grezzo e componenti frequenziali.
- Integrabile su IoT gateway, PLC, PC industriali e cloud per monitoraggio continuo 24/7.
ROI e impatto sul business
- Riduzione fermi macchina: 30-50% — la manutenzione predittiva anticipa i guasti e permette di programmare le fermate nei momenti di minor impatto produttivo.
- Risparmio sui ricambi: 20-30% — i componenti vengono sostituiti solo quando realmente necessari, non a scadenza fissa.
- Controllo qualità e collaudi: analisi armonica di componenti meccanici per verificare la conformità agli standard di produzione.
- IoT e sensori intelligenti: elaborazione in tempo reale di dati vibrazionali direttamente su dispositivi embedded, senza necessità di inviare tutto al cloud.
- Telecomunicazioni: analisi di banda e modulazione per reti LTE, Wi-Fi e DVB-T.

Cliccare in un punto qualsiasi della griglia per aggiungere un nuovo punto sperimentale, oppure trascinare un punto esistente per regolarne la posizione in tempo reale.
Modificare il grado del polinomio per definirne il comportamento.
Utilizzare il bottone "Random" per generare istantaneamente una configurazione casuale di punti distribuiti sul piano.
Utilizzare il bottone "Clear" per svuotare completamente il grafico.
Utilizzare il bottone "Remove" per eliminare un punto selezionato o l'ultimo punto inserito dal grafico.
Utilizzare il bottone "Add" per aggiungere un punto casuale al grafico.
Valore per la tua azienda
- Il Curve Fit trasforma dati grezzi in modelli matematici utilizzabili per prevedere comportamenti, ottimizzare parametri e controllare la qualità in tempo reale.
- Ogni azienda genera montagne di dati sperimentali: temperature, pressioni, velocità, tempi ciclo. Senza un modello matematico che li descriva, questi dati restano informazione inutilizzata. Con il fitting polinomiale diventano know-how industriale.
Cosa risolviamo
- Ottimizzazione basata su tentativi: regolate i parametri di produzione a occhio o per tentativi, con risultati incoerenti e spreco di materiale.
- Dati non modellati: raccogliete dati ma non li usate per prevedere l'effetto delle variabili di processo sulla qualità del prodotto.
- Overfitting/underfitting: senza gli strumenti giusti rischiate modelli troppo complessi (che si adattano al rumore) o troppo semplici (che perdono segnale).
La nostra tecnologia
- Il fitting utilizza la decomposizione ai valori singolari (SVD) per risolvere il sistema lineare sovradeterminato, garantendo stabilità numerica anche per polinomi di grado elevato.
- La qualità del modello viene quantificata tramite R² e RMSE, permettendo un confronto oggettivo tra diverse ipotesi di modellazione.
- Visualizzazione simultanea di punti originali, curva interpolante e bande di confidenza per una valutazione immediata.
ROI e impatto sul business
- Ottimizzazione parametri di processo: riduzione di scarti e rilavorazioni trovando il punto di lavoro ideale (temperatura, pressione, velocità).
- Analisi e controllo qualità: modellazione di curve di taratura per strumenti di misura e sensori industriali, con tracciabilità completa.
- Ricerca e sviluppo: fitting di dati sperimentali per estrarre parametri fisici, chimici o biologici da misure di laboratorio — meno test fisici, più simulazioni.
- Energia e sostenibilità: modellazione di curve di produzione di impianti fotovoltaici o eolici per la previsione della resa energetica.
Trascinare un punto qualsiasi del tessuto per alterarne il comportamento.
Cliccare sul bottone "Cut" per abilitare la funzione di taglio.
Cliccando sul tessuto mentre si è in questa funzione, si potranno creare dei
buchi al suo interno.
Utilizzare il bottone "Reset" per azzerare i dati della simulazione.
Valore per la tua azienda
- La Cloth Simulation modella materiali deformabili come maglie di particelle interconnesse, consentendo di simulare digitalmente il comportamento di tessuti, membrane e materiali flessibili prima di realizzare prototipi fisici.
- In ambito industriale, questa tecnologia si applica a textile engineering, automotive (rivestimenti), arredamento, robotica soft e simulazioni chirurgiche — ovunque serva prevedere il comportamento di materiali deformabili.
Cosa risolviamo
- Prototipazione fisica costosa: ogni modifica a un tessuto, rivestimento o membrana richiede prototipi reali, con tempi e costi elevati.
- Comportamento imprevedibile: senza simulazione, scoprite solo in fase di assemblaggio se un materiale si comporta come desiderato.
- Iterazioni lunghe: il ciclo progettazione-prototipo-test richiede settimane per ogni variazione.
La nostra tecnologia
- Integratore numerico di Verlet per aggiornare posizioni e velocità delle particelle con buona stabilità e basso costo computazionale.
- Vincoli elastici risolti iterativamente con Projection Constraints, garantendo distanze corrette tra particelle e struttura del materiale.
- Griglia spaziale per ottimizzare il rilevamento delle collisioni, garantendo performance fluide anche per maglie ad alta risoluzione.
ROI e impatto sul business
- Riduzione prototipi fisici: 50-70% — simulate digitalmente decine di varianti di materiale prima di produrre il primo campione reale.
- Time-to-market ridotto: il ciclo di sviluppo di nuovi prodotti tessili o rivestimenti passa da settimane a giorni.
- Automotive e arredamento: modellazione virtuale di rivestimenti, tappezzerie e tessuti tecnici per interni di veicoli e mobili.
- Robotica soft: progettazione e simulazione di attuatori e gripper flessibili in materiali deformabili.
- Architettura e design: simulazione di tensostrutture e membrane architettoniche per progetti di ingegneria civile.

Utilizzare il bottone "Restart" per ricominciare la simulazione da zero.
Utilizzare il bottone "Random" per avviare una configurazione casuale degli agenti.
Utilizzare il bottone "Clear field" per svuotare il campo e ripartire da una griglia vuota.
Utilizzare "Pause" per fermare l'esecuzione e "Step" per avanzare frame per frame.
Regolare lo slider "Speed" per modificare la velocità di aggiornamento degli agenti.
Modificare il numero di "Agents" per aumentare o diminuire la dimensione dello sciame.
Usare "Zoom" (click + drag) e la rotellina del mouse per navigare nella griglia.
Valore per la tua azienda
- La Swarm Intelligence è un sistema multi-agente decentralizzato in cui centinaia di entità autonome esplorano e coprono un'area senza controllo centralizzato — la stessa logica che permette a sciami di droni, flotte di robot e sistemi di coverage automatico di operare con efficienza e robustezza.
- L'approccio è estremamente scalabile e fault tolerant: se un agente si guasta, gli altri continuano a operare. Più agenti si aggiungono, più velocemente il compito viene completato.
Cosa risolviamo
- Coordinamento centralizzato complesso: gestire singolarmente ogni unità di una flotta diventa impossibile all'aumentare del numero di agenti.
- Sistemi fragili: un sistema centralizzato si ferma se il server centrale si guasta. Con lo sciame non esiste punto unico di fallimento.
- Copertura inefficiente: senza logica di dispersione, più unità possono sovrapporsi, sprecando risorse e tempo.
La nostra tecnologia
- Popolazione di agenti autonomi che operano in parallelo su una griglia discreta, aggiornando posizione e stato in un loop di simulazione ad alta frequenza.
- Ogni agente applica euristiche locali per massimizzare la distanza dai vicini (dispersione) e minimizzare le sovrapposizioni, generando pattern di blue noise distribution.
- Nessun agente ha visione globale: il comportamento emergente deriva esclusivamente dalle interazioni locali, proprio come negli sciami naturali.
ROI e impatto sul business
- Magazzini automatici: flotte di robot per picking e movimentazione che si coordinano autonomamente, riducendo i colli di bottiglia.
- Agricoltura di precisione: copertura uniforme del terreno per irrorazione, monitoraggio e raccolta tramite sciame di droni.
- Ispezione industriale: droni che esplorano e mappano autonomamente grandi aree (impianti, gallerie, miniere) senza guida centrale.
- Difesa e sicurezza: coordinamento di unità robotiche per sorveglianza di aree vaste o pericolose.
- Pulizia e sanificazione automatica: robot distribuiti che coprono sistematicamente superfici senza sovrapposizioni.

Ogni particella si muove autonomamente e si collega istantaneamente agli altri punti vicini.
Utilizzare i controlli per modificare distanza, quantità, tonalità e velocità.
Utilizzare il bottone "Reset" per resettare l'esecuzione'.
Utilizzare il bottone "Random" per avviare l'esecuzione con parametri casuali.
Valore per la tua azienda
- Connections visualizza come strutture di rete emergano dinamicamente dalla semplice regola di prossimità — un modello applicabile a reti di sensori IoT, dispositivi connessi, infrastrutture di rete e sistemi multi-agente.
- In uno scenario industriale, ogni particella può rappresentare un sensore, un macchinario, un veicolo o un dispositivo, e le connessioni che si attivano in base alla distanza simulano reti mesh, comunicazioni device-to-device e topologie dinamiche.
Cosa risolviamo
- Reti statiche difficili da interpretare: i diagrammi di rete tradizionali non mostrano come le connessioni cambiano nel tempo.
- Simulazione di scenari what-if: come si riconfigura la rete se un nodo cade? Quali connessioni si attivano in condizioni di carico?
- Comunicazione tra tecnici e stakeholder: una visualizzazione dinamica comunica il comportamento del sistema molto più efficacemente di un report.
La nostra tecnologia
- Il sistema modella una collezione di agenti autonomi dotati di posizione e velocità proprie, aggiornati in un loop di rendering su Canvas.
- Ad ogni frame viene calcolata la distanza euclidea tra tutte le coppie di particelle — se inferiore al raggio impostato, viene disegnata una connessione.
- Parametri interattivi (distance, quantity, speed) controllano direttamente le variabili del modello, offrendo feedback visivo immediato.
ROI e impatto sul business
- Visualizzazione di reti IoT: monitoraggio dinamico dello stato di sensori e dispositivi, con connessioni che cambiano in base a segnale, carico o prossimità.
- Simulazione di sistemi multi-agente: studio del comportamento emergente in sciami di droni o robot che interagiscono per prossimità.
- Design generativo e installazioni interattive: creazione di esperienze visive immersive per fiere, showroom e spazi corporate.
- Interfacce utente avanzate: particle system come elemento grafico reattivo in applicazioni web, mobile e totem interattivi.
Cliccare su "Start Simulation" per avviare la simulazione del controllore PID.
Regolare gli slider Proportional Control (Kp), Integral Control (Ki) e Derivative Control (Kd) per osservare la risposta del sistema in tempo reale.
Modificare il valore SP (Set Point) con le frecce su/giù per cambiare il punto di riferimento del segnale.
Utilizzare lo slider Sim Speed per regolare la velocità della simulazione tra Fast e Slow.
Attivare Split View per visualizzare contemporaneamente il Set Point e l'Output sul grafico.
Valore per la tua azienda
- Il PID Controller è l'algoritmo di controllo più diffuso nell'automazione industriale: regola temperatura, velocità, pressione, livello e centinaia di altre variabili di processo in ogni settore produttivo.
- Un PID ben tarato significa qualità costante del prodotto, minor consumo energetico, minori scarti e macchine che durano di più. Un PID mal tarato significa oscillazioni, sovraelongazioni e prodotto fuori specifica.
Cosa risolviamo
- Taratura manuale a tentativi: i tecnici regolano Kp, Ki e Kd "a orecchio", ottenendo controlli subottimali che consumano più energia e generano scarti.
- Deriva dei parametri nel tempo: un PID tarato anni fa oggi potrebbe non essere più ottimale a causa di usura meccanica o cambiamenti del processo.
- Difficoltà di diagnosi: quando un processo oscilla, è un problema del controllore, del processo o dei sensori? Il simulatore aiuta a capirlo.
La nostra tecnologia
- Il controllore calcola l'errore e(t) come differenza tra setpoint e variabile di processo, applicando le tre azioni: proporzionale (risposta immediata), integrale (eliminazione errore stazionario), derivativa (anticipo delle correzioni).
- La simulazione utilizza un modello dinamico del processo per visualizzare la risposta in modo realistico, con possibilità di introdurre disturbi.
- Integrabile in sistemi SCADA, PLC e controllori embedded per taratura automatica e ottimizzazione continua dei loop di controllo.
ROI e impatto sul business
- Risparmio energetico: 10-25% — un PID ottimizzato riduce le oscillazioni e mantiene il processo nel punto di massima efficienza.
- Qualità costante del prodotto — la variabile controllata resta sempre vicina al setpoint, eliminando derive e fuori specifica.
- Controllo di temperatura: forni industriali, climatizzazione e refrigerazione.
- Regolazione di velocità: motori elettrici, nastri trasportatori e robotica.
- Automazione industriale: taratura automatica di macchine e linee di produzione per garantire qualità e ripetibilità.

Configurare i parametri di gestione scorte: Avg Demand (domanda media), Lead Time (tempo di consegna), Safety Stock (scorta di sicurezza), Order Qty (quantità d'ordine), Variability (variabilità) e Init Stock (stock iniziale).
Regolare lo slider Speed per modificare la velocità della simulazione.
Utilizzare i bottoni Start per avviare, Stop per interrompere, Reset per ripristinare e Random per generare parametri casuali.
La legenda mostra: ROP (punto di riordino), SS (safety stock), Stock (giacenza), Ord (ordine in corso), Arr (arrivo merce) e Out (uscita).
In basso vengono visualizzati in tempo reale: Day (giorno), Stock (giacenza attuale), ROP (valore di riordino) e Pending (stato ordine).
Valore per la tua azienda
- Il Reorder Point (ROP) è la tecnica fondamentale per gestire le scorte in modo efficiente: determina esattamente quando riordinare per evitare sia la rottura di stock sia l'eccesso di magazzino.
- Ogni giorno di fermo produzione per mancanza di materiale costa migliaia di euro. Ogni euro immobilizzato a magazzino è un euro che non lavora per l'azienda. Il ROP trova il bilanciamento ottimale tra questi due rischi.
Cosa risolviamo
- Rotture di stock improvvise: la produzione si ferma perché manca una materia prima, con perdite enormi in termini di ore-uomo e macchina ferma.
- Scorte eccessive: tenete a magazzino molto più del necessario "per sicurezza", immobilizzando capitale che potrebbe essere investito altrove.
- Gestione basata sull'intuito: gli ordini vengono fatti "quando sembra che stia finendo", senza criterio scientifico, generando alternating di stock-out e eccedenze.
La nostra tecnologia
- Il punto di riordino viene calcolato come ROP = (Domanda media × Lead time) + Scorta di sicurezza, dove la scorta di sicurezza dipende dalla variabilità della domanda e dal livello di servizio target.
- La simulazione integra modelli probabilistici per rappresentare la variabilità della domanda e dei tempi di consegna.
- I risultati sono aggiornati in tempo reale per ogni modifica dei parametri, permettendo un'analisi immediata dei trade-off tra costi e servizio.
ROI e impatto sul business
- Riduzione scorte: 20-40% — ottimizzando i parametri di riordino si libera capitale immobilizzato senza aumentare il rischio di rottura stock.
- Zero fermi produzione per mancanza materiali — il sistema garantisce che il materiale arrivi sempre prima dell'esaurimento.
- Supply chain e logistica: pianificazione approvvigionamenti e riduzione tempi di fermo produzione.
- Retail e distribuzione: calcolo automatico dei punti di riordino per punti vendita e centri distribuzione.
- Manutenzione predittiva: gestione scorte di ricambi in base alla programmazione degli interventi.

Configurare i parametri di pianificazione tramite gli slider: Jobs (numero di lavori), Machines (numero di macchine), Parallel (grado di parallelismo) e Cycles (cicli di produzione).
Cliccare su "Generate" per creare automaticamente il piano di produzione in base ai parametri impostati.
Selezionare la strategia di scheduling tramite il pulsante FIFO (o altre policy disponibili) per cambiare la regola di priorità dei lavori.
Cliccare su "Play" per avviare l'esecuzione della simulazione e su "Reset" per ripristinare lo stato iniziale.
Regolare lo slider Speed per modificare la velocità di esecuzione della simulazione.
In tempo reale vengono visualizzate le metriche: Makespan (tempo totale di completamento), Idle (tempo di inattività) e Avg (tempo medio di completamento), insieme al valore Time corrente.
Valore per la tua azienda
- Il Production Planning risolve il problema di allocare risorse produttive limitate (macchine, operatori, materiali) per soddisfare la domanda, minimizzando tempi, costi e colli di bottiglia.
- Una pianificazione inefficiente significa macchine ferme, consegne in ritardo, straordinari non necessari e clienti insoddisfatti. Con i nostri algoritmi, ogni risorsa produttiva lavora a saturazione ottimale.
Cosa risolviamo
- Pianificazione manuale in Excel: il planner impiega ore a sistemare ordini su fogli di calcolo, con risultati che sono già obsoleti al primo imprevisto.
- Colli di bottiglia non identificati: senza una visione sistemica, alcune macchine si accumulano di lavoro mentre altre restano inutilizzate.
- Risposta lenta ai cambiamenti: un ordine urgente o un guasto richiedono ore per essere riplanificati manualmente.
La nostra tecnologia
- Il problema viene modellato come scheduling con vincoli di risorse, risolto attraverso euristiche e algoritmi di ottimizzazione combinatoria.
- Tecniche di ricerca locale e algoritmi greedy costruiscono una soluzione iniziale, affinata poi attraverso scambi e riottimizzazioni.
- La visualizzazione interattiva mostra il piano in formato diagramma di Gantt con indicatori di performance: makespan, utilizzo risorse, ritardi.
ROI e impatto sul business
- Aumento del throughput: 15-30% — la stessa fabbrica produce di più con le stesse risorse, semplicemente schedulando meglio.
- Riduzione dei ritardi di consegna — il piano rispetta le scadenze e privilegia gli ordini prioritari in modo automatico.
- Industria 4.0: integrazione con sistemi MES e ERP per pianificazione in tempo reale, con reagibilità immediata a guasti e urgenze.
- Stampaggio, lavorazione e assemblaggio: sequenziamento di lotti e ottimizzazione dei cambi formato.
- Logistica interna: coordinamento tra produzione e movimentazione materiali per ridurre i tempi di attraversamento.

Cliccare sulla griglia per posizionare il punto di Start (verde) e di End (rosso).
Cliccare e trascinare per disegnare muri e ostacoli sulla griglia.
Utilizzare il bottone "Find" per avviare la ricerca del percorso ottimale.
Utilizzare il bottone "Clear" per ripulire la griglia.
Utilizzare il bottone "Random" per generare muri casuali e posizionare automaticamente i due punti.
Valore per la tua azienda
- L'algoritmo A* (A Star) è lo standard industriale per la pianificazione di percorsi ottimali in ambienti con ostacoli: utilizzato in robotica, veicoli autonomi, navigazione GPS e sistemi di evacuazione.
- A* combina il costo effettivo del già percorso con una stima euristica della distanza rimanente, garantendo efficienza e ottimalità anche in spazi complessi con migliaia di possibili percorsi.
Cosa risolviamo
- Percorsi inefficienti: i vostri AGV, robot o operatori seguono percorsi prestabiliti che non si adattano agli ostacoli o alle condizioni del momento.
- Navigazione in ambienti dinamici: un percorso ottimale al mattino può essere bloccato nel pomeriggio — serve ricalcolo in tempo reale.
- Ottimizzazione manuale impossibile: in un magazzino con 10.000 posizioni, trovare il percorso minimo a mano è umanamente impossibile.
La nostra tecnologia
- La griglia viene rappresentata come grafo implicito, dove ogni cella è un nodo e le celle adiacenti sono collegate da archi con pesi diversi per movimenti ortogonali e diagonali.
- Funzione di valutazione f(n) = g(n) + h(n), dove g(n) è il costo reale dal nodo iniziale e h(n) l'euristica che stima il costo rimanente.
- La simulazione è completamente interattiva: ogni modifica agli ostacoli o ai punti di start/end rilancia immediatamente la ricerca.
ROI e impatto sul business
- Magazzini automatici: percorsi minimi per robot di picking e stoccaggio, riducendo i tempi di evasione ordini del 20-30%.
- Robotica e droni: pianificazione del movimento in ambienti con ostacoli, garantendo percorsi sicuri ed efficienti.
- Logistica e trasporti: itinerari per flotte di consegna ottimizzando carburante e tempi in ambienti complessi.
- Sistemi di evacuazione e sicurezza: simulazione di percorsi di fuga ottimali in ambienti affollati con ostacoli imprevisti.

Cliccare e trascinare per disegnare muri e ostacoli sulla griglia.
Il sistema calcola automaticamente i percorsi dalla sinistra verso destra e dall'alto verso il basso.
Utilizzare il bottone "Random" per generare muri casuali.
Utilizzare il bottone "Restart" per ricominciare da capo.
Regolare lo slider "Speed" per modificare la velocità della simulazione.
Valore per la tua azienda
- L'algoritmo di Dijkstra calcola il percorso minimo da una sorgente a tutte le destinazioni raggiungibili in una rete — fondamentale per logistica, reti di telecomunicazioni, sistemi di trasporto e movimentazione.
- In questa simulazione, migliaia di agenti trovano autonomamente il percorso ottimale attraverso un campo di ostacoli, dimostrando come flotte di mezzi, pacchetti dati o personale operativo possano essere instradati in modo efficiente.
Cosa risolviamo
- Instradamento inefficiente: senza un algoritmo di percorso minimo, ogni agente segue una rotta subottimale, accumulando ritardi e consumi.
- Scalabilità: con migliaia di agenti in movimento simultaneo, serve un algoritmo che calcoli tutti i percorsi in parallelo in tempo reale.
- Adattamento dinamico: gli ostacoli cambiano? Il sistema deve ricalcolare istantaneamente tutti i percorsi coinvolti.
La nostra tecnologia
- La griglia viene rappresentata come grafo implicito dove ogni cella è un nodo collegato alle adiacenti.
- L'algoritmo di Dijkstra viene eseguito in tempo reale per ogni sorgente, calcolando le distanze minime verso tutte le celle raggiungibili.
- La simulazione è completamente interattiva: ogni modifica agli ostacoli scatena il ricalcolo immediato dei percorsi.
ROI e impatto sul business
- Logistica e trasporti: pianificazione di itinerari per flotte di consegna ottimizzando carburante e tempi di percorrenza.
- Reti di telecomunicazioni: instradamento ottimale di pacchetti dati in reti complesse con vincoli dinamici.
- Videogiochi e simulazioni: pathfinding per personaggi e veicoli autonomi in ambienti con ostacoli dinamici.
- Sistemi di evacuazione: percorsi di fuga ottimali in ambienti affollati.
Selezionare un algoritmo per visualizzarne il funzionamento.
Utilizzare i controlli per regolare velocità e dimensione dell'array.
Valore per la tua azienda
- Gli algoritmi di ordinamento sono alla base di qualsiasi sistema informativo: database, motori di ricerca, analisi dati, sistemi di raccomandazione e molto altro.
- Scegliere l'algoritmo giusto per il contesto giusto può fare la differenza tra un'elaborazione che richiede secondi e una che richiede ore. Quick Sort, Merge Sort, Heap Sort — ognuno ha il suo punto di forza in base ai dati e ai vincoli.
Cosa risolviamo
- Prestazioni degradate: un database con milioni di record ordinato con l'algoritmo sbagliato impiega ordini di grandezza in più del necessario.
- Scelta dell'algoritmo: senza conoscere le complessità computazionali, gli sviluppatori usano l'algoritmo più semplice (Bubble Sort) anche quando non è appropriato.
- Vincoli di memoria: in sistemi embedded o IoT, la memoria disponibile detta quale algoritmo di ordinamento è praticabile.
La nostra tecnologia
- Implementazione di tutti gli algoritmi classici: Bubble Sort, Quick Sort, Merge Sort, Heap Sort, Insertion Sort, Selection Sort.
- Ogni algoritmo è eseguito in modo asincrono per garantire visualizzazione fluida senza bloccare il browser.
- Rendering ottimizzato tramite Canvas per gestire in tempo reale l'animazione di migliaia di elementi.
ROI e impatto sul business
- Database e sistemi informativi: ordinamento di record per chiavi primarie, date o priorità — risposte più veloci agli utenti.
- Elaborazione dati e analisi: preparazione di dataset per machine learning o visualizzazione statistica con performance ottimali.
- Sistemi embedded e IoT: ordinamento di stream di sensori per rilevare pattern o anomalie in tempo reale su dispositivi a risorse limitate.
- Ricerca binaria: dati ordinati permettono ricerche O(log n) invece di O(n) — un fattore 1000x su dataset di un milione di elementi.
Cliccare nello sfondo per aggiungere un nuovo Bot.
Utilizzare il bottone "Riavvia" per ricominciare la simulazione.
Utilizzare il bottone "Pausa/Riprendi" per interrompere l'avanzamento.
Valore per la tua azienda
- Il diagramma di Voronoi suddivide lo spazio in regioni in base alla distanza da punti generatori — uno strumento potentissimo per analisi territoriale, logistica, segmentazione di mercato e pianificazione reti.
- Ogni cella rappresenta l'area di competenza più vicina a un punto di riferimento: utile per ottimizzare zone di copertura di filiali, magazzini, hub logistici, punti vendita o stazioni di servizio.
Cosa risolviamo
- Suddivisione territoriale arbitraria: i confini delle zone di competenza vengono decisi a mano, senza criterio oggettivo di ottimalità.
- Copertura non uniforme: alcuni punti di servizio sono sovraccarichi mentre altri sono sottoutilizzati — Voronoi aiuta a ridisegnare i confini.
- Difficoltà di analisi: senza una partizione geometrica dello spazio, è difficile rispondere a domande come "qual è il punto di servizio più vicino a questo cliente?".
La nostra tecnologia
- Costruzione del diagramma con Fortune's Algorithm, complessità O(n log n).
- Calcolo di bordi e vertici delle celle con gestione stabile di casi limite e confinamento.
- Aggiornamento in tempo reale mediante triangolazioni di Delaunay e strutture dati spaziali per il calcolo efficiente delle distanze.
ROI e impatto sul business
- Analisi spaziale e territoriale: suddivisione di aree in base a punti di interesse (ospedali, scuole, sensori, filiali) per visualizzare zone di copertura.
- Logistica: definizione dei bacini di competenza per magazzini e hub di distribuzione, minimizzando le distanze di consegna.
- Marketing territoriale: segmentazione del mercato per zone di influenza di punti vendita o showroom.
- Elaborazione immagini e computer vision: segmentazione basata su prossimità.
- Simulazioni scientifiche: modellazione di cristallizzazione, crescita cellulare o distribuzione di risorse.
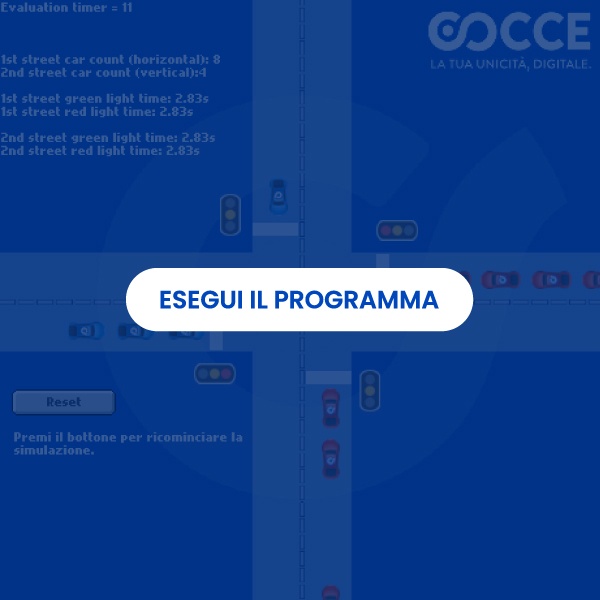
Valore per la tua azienda
- Il controllore a logica fuzzy gestisce in modo intelligente e adattivo sistemi complessi dove le variabili non sono perfettamente note o lineari — perfetto per semafori intelligenti, regolazione di flussi industriali, controllo di processi non lineari e gestione della congestione.
- A differenza del controllo binario tradizionale (acceso/spento), la logica fuzzy ragiona in termini di "poco", "medio", "molto" — come farebbe un operatore umano esperto — producendo transizioni fluide e naturali.
Cosa risolviamo
- Controllo a soglia rigida: i sistemi tradizionali attivano/disattivano bruscamente, causando oscillazioni e instabilità.
- Processi non lineari: molti processi industriali hanno comportamenti che un PID lineare non riesce a gestire adeguatamente.
- Conoscenza esperta non codificata: gli operatori esperti sanno come regolare il processo "a sentimento", ma quel know-how non è trasferito in automazione.
La nostra tecnologia
- Il controller riceve input dai sensori e li converte in valori fuzzy tramite funzioni di appartenenza.
- Regole del sistema definite nel formato IF-THEN che producono in output il valore di controllo ottimale.
- Il processo di defuzzificazione traduce il risultato fuzzy in un valore numerico concreto per gli attuatori.
ROI e impatto sul business
- Smart City e mobilità: gestione adattiva di semafori per ridurre congestione, emissioni e tempi di percorrenza fino al 30%.
- Controllo di processi industriali: forni, miscelatori e impianti chimici dove la logica fuzzy fornisce risposta stabile anche con parametri non lineari.
- Gestione flussi logistici interni: coordinamento di semafori per veicoli industriali (carrelli elevatori, AGV, muletti) migliorando sicurezza e produttività.
- Ottimizzazione cicli produttivi: bilanciamento automatico del carico tra stazioni di una linea di assemblaggio.
Valore per la tua azienda
- Il motore di particelle gestisce migliaia di elementi soggetti a gravità, collisioni e interazioni dinamiche — utilizzato per visualizzazione dati, monitoraggio in tempo reale, simulazioni scientifiche e interfacce interattive.
- Ogni particella può rappresentare un dato: una transazione finanziaria, un sensore IoT, un veicolo in flotta o un cliente. Il movimento e le interazioni tra particelle rendono comprensibili visivamente grandi volumi di dati.
Cosa risolviamo
- Dati difficili da interpretare: tabelle e grafici statici non comunicano l'evoluzione dinamica dei fenomeni in tempo reale.
- Monitoraggio poco intuitivo: senza una visualizzazione immediata, le anomalie passano inosservate fino a quando non causano danni.
- Coinvolgimento scarso: dashboard aziendali tradizionali annoiano gli stakeholder — un'interfaccia dinamica cattura l'attenzione.
La nostra tecnologia
- Aggiornamento in tempo reale di posizione, velocità e accelerazione per ciascuna delle migliaia di particelle.
- Rilevamento collisioni con griglia spaziale per performance fluide anche al massimo carico.
ROI e impatto sul business
- Visualizzazione dati finanziari: particelle che rappresentano transazioni, animate in base a volume o valore, per una panoramica dinamica del mercato.
- Monitoraggio reti IoT: particelle che indicano lo stato dei nodi, cambiando colore in base a temperatura, segnale o attività — anomalie visibili immediatamente.
- Simulazioni scientifiche: visualizzazione di flussi complessi come movimento di fluidi o propagazione di onde.
- Interfacce utente e gamification: feedback visivi dinamici per applicazioni web, mobile, totem interattivi e formazione aziendale.

Utilizzare il bottone "Ricrea grafo" per ricominciare.
Trascinare i punti per cambiarne la disposizione
Utilizzare il bottone "Ferma auto regolazione" per interrompere la funzionalità di disposizione automaticamente.
Valore per la tua azienda
- ForceAtlas2 trasforma automaticamente la struttura di una rete in una disposizione bidimensionale leggibile, mettendo in evidenza comunità, nodi centrali e relazioni chiave.
- Ogni azienda ha reti nascoste: relazioni tra clienti, fornitori, prodotti, flussi produttivi, organigrammi informali. ForceAtlas2 le rende visibili e interpretabili.
Cosa risolviamo
- Dati relazionali non sfruttati: avete dati sulle connessioni ma non riuscite a visualizzarli in modo che raccontino una storia.
- Comunità nascoste: senza un layout force-directed, cluster e gruppi rimangono invisibili all'interno della matrice di connessioni.
- Nodi centrali non identificati: quali sono gli elementi chiave della rete? ForceAtlas2 li posiziona al centro in modo naturale.
La nostra tecnologia
- Simulazione di un sistema fisico iterativo: nodi e archi interagiscono come cariche elettriche e molle (legge di Hooke).
- Per grafi di grandi dimensioni, ottimizzazione Barnes-Hut che riduce i tempi di calcolo.
- Algoritmo parallelizzato e disponibile anche in JavaScript/WebAssembly per usi web interattivi.
ROI e impatto sul business
- Marketing e business: visualizzazione di legami tra clienti, prodotti e fornitori per identificare opportunità cross-selling e up-selling.
- Investigazioni e compliance: mappatura di relazioni tra persone, gruppi ed eventi per audit e due diligence.
- Grafi semantici e knowledge graph: rappresentazione di concetti ed entità per sistemi di raccomandazione e ricerca semantica.
- Manifattura e Industria 4.0: tracciamento di flussi produttivi e macchinari interconnessi.
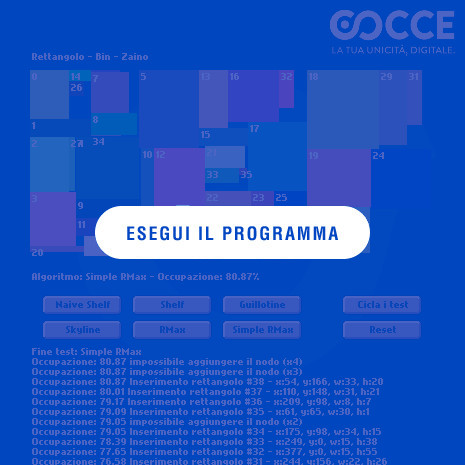
Selezionare un tipo di algoritmo da utilizzare
Utilizzare il bottone "Cicla i test" per ciclare tra i vari algoritmi disponibili
Utilizzare il bottone "Reset" per ricominciare.
Valore per la tua azienda
- Il Bin Packing risolve il problema di allocare oggetti di dimensioni diverse all'interno del numero minimo di contenitori — dalla logistica alle spedizioni, dall'imballaggio alla pianificazione produttiva.
- Ogni centimetro di spazio non utilizzato in un container, un camion o un imballaggio è denaro sprecato. I nostri algoritmi euristici trovano la disposizione ottimale in tempi compatibili con le esigenze produttive.
Cosa risolviamo
- Carico manuale inefficiente: gli operatori caricano i container "a occhio", lasciando vuoti che potevano essere riempiti.
- Spedizioni multiple evitabili: un carico mal ottimizzato richiede un container in più, raddoppiando i costi di trasporto.
- Spreco di materiale d'imballaggio: senza ottimizzazione si usano scatole troppo grandi o troppi imballi secondari.
La nostra tecnologia
- Implementati 6 algoritmi euristici per ottenere soluzioni approssimate ottimali in tempi accettabili. L'algoritmo "RMax" risulta il più efficiente.
- Supporto per rotazione a 90° degli oggetti e contenitori a dimensioni fisse.
ROI e impatto sul business
- Riduzione dei costi di trasporto: 15-25% — meno container e camion necessari per lo stesso volume di merce.
- Logistica e trasporti: ottimizzazione del carico di camion, container o altri mezzi di trasporto.
- Processi produttivi: organizzazione delle fasi di produzione per massimizzare l'efficienza e ridurre gli sprechi di materiale.
- Imballaggio e spedizioni: disposizione ottimale degli oggetti all'interno di scatole o pacchi, riducendo volume e costi di spedizione.

Utilizzare la manopola per modificare il numero di neuroni del livello nascosto.
Utilizzare il bottone "Avanti turno" per eseguire una singola partita.
Valore per la tua azienda
- Questa demo mostra una rete neurale feedforward che apprende autonomamente a prendere decisioni — la stessa architettura utilizzata per previsione della domanda, classificazione, ottimizzazione scorte e sistemi di raccomandazione.
- La rete neurale impara dalla propria esperienza, migliorando le performance nel tempo esattamente come farebbe un sistema di previsione della domanda che affina le sue stime a ogni ciclo di vendita.
Cosa risolviamo
- Previsioni inaccurate: senza machine learning, le previsioni si basano su medie storiche o intuizioni, con errori che portano a sovrapproduzione o stock-out.
- Classificazione manuale: ordinare, categorizzare o prioritizzare elementi a mano è lento, costoso e soggettivo.
- Sistemi che non imparano: un sistema deterministico ripete gli stessi errori. Una rete neurale si adatta e migliora.
La nostra tecnologia
- Implementazione di una Feedforward Neural Network con 38 neuroni di ingresso, strato nascosto configurabile e uscita decisionale binaria.
- L'architettura è la stessa utilizzata per problemi di classificazione, regressione e previsione nel mondo reale.
ROI e impatto sul business
- Previsione della domanda: anticipare le vendite per ottimizzare la produzione e le scorte, riducendo rotture di stock e sovrapproduzione.
- Approvvigionamento intelligente: individuazione e previsione degli articoli che più facilmente vanno in esaurimento.
- Classificazione e riconoscimento pattern: automazione di attività di categorizzazione che oggi richiedono risorse umane.

Utilizzare il campo di modifica testo per sostituire la stringa obiettivo.
Utilizzare il bottone "Epidemia" per limitare il numero dei minions.
Valore per la tua azienda
- Gli algoritmi genetici sono ispirati all'evoluzione darwiniana: una popolazione di soluzioni evolve nel tempo attraverso selezione, crossover e mutazione, convergendo verso il risultato ottimale.
- Sono particolarmente efficaci quando lo spazio delle soluzioni è troppo vasto per una ricerca esaustiva — scheduling, routing, ottimizzazione di parametri, design di reti e problemi combinatori.
Cosa risolviamo
- Problemi con troppe variabili: quando le combinazioni possibili sono miliardi, nessuna forza bruta può trovare la soluzione ottimale.
- Ottimizzazione multi-obiettivo: gli algoritmi genetici gestiscono naturalmente trade-off tra obiettivi contrastanti (costo vs qualità, tempo vs risorse).
- Soluzioni che migliorano nel tempo: a differenza delle euristiche statiche, l'algoritmo genetico continua a evolvere e trovare soluzioni migliori.
La nostra tecnologia
- Implementazione di un algoritmo genetico con selezione, crossover e mutazione casuale per garantire l'evoluzione della popolazione.
- Risorsa primaria limitata ("cibo") che modella i vincoli realistici di budget, tempo o materiali.
ROI e impatto sul business
- Ottimizzazione spaziale di percorsi: routing di flotte e consegne con vincoli multipli.
- Scheduling della produzione: sequenziamento ottimale di ordini su macchine parallele con tempi di setup.
- Progettazione di reti: configurazione di reti di distribuzione, telecomunicazioni o sensori con copertura ottimale.
- Qualunque problema quantificabile: un algoritmo genetico può cercare la soluzione migliore in qualsiasi spazio di soluzioni dove esiste una funzione di fitness.
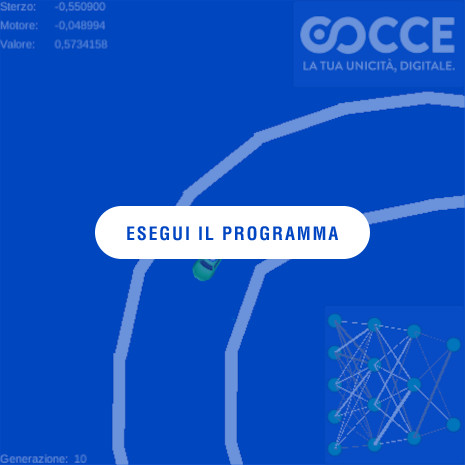
Valore per la tua azienda
- Il 2D Car Steering System combina reti neurali e algoritmi genetici per creare un sistema di guida autonoma che impara da solo a navigare un percorso — la stessa tecnologia alla base di veicoli a guida autonoma, AGV industriali, robot tagliaerba, droni e sistemi di movimentazione automatica.
- L'auto virtuale ha cinque sensori frontali che misurano la distanza dagli ostacoli: un'architettura identica a quella dei robot mobili reali che utilizzano sensori a infrarossi, ultrasonici o LiDAR.
Cosa risolviamo
- Programmazione manuale di traiettorie: scrivere a mano le istruzioni di movimento per ogni scenario è complesso e non scalabile.
- Adattamento a percorsi variabili: un ambiente produttivo cambia continuamente — il sistema deve adattarsi senza essere riprogrammato.
- Neurorobotica: l'approccio evolutivo permette di addestrare il sistema in simulazione e trasferire l'esperienza nel robot reale (sim-to-real).
La nostra tecnologia
- Le auto sono guidate da una Feedforward Neural Network con 5 ingressi (sensori di distanza) e 2 uscite (motore e sterzo).
- I pesi della rete vengono addestrati con un algoritmo genetico, simulando l'evoluzione naturale per selezionare i guidatori migliori.
ROI e impatto sul business
- AGV e robot mobili: sistemi di navigazione autonoma per magazzini e fabbriche che imparano a muoversi in ambienti complessi.
- Robot tagliaerba e pulizie: mappatura e navigazione autonoma senza bisogno di fili perimetrali o marcature a terra.
- Taratura automatica sensori: il sistema impara a interpretare i sensori e a compensare derive e inaccuratezze.
- Prototipazione rapida: addestramento in simulazione prima di implementare su hardware reale, riducendo tempi e costi di sviluppo.